



智能控制系统
来源: 中通联达发布时间: 2014-06-18
智能控制系统的原理
控制理论是工程学与数学的跨领域分支,主要处理在有输入信号的动力系统的行为。系统的外部输入称为“参考值”,系统中的一个或多个变量需随着参考值变化,控制器处理系统的输入,使系统输出得到预期的效果。
控制理论一般的目的是借由控制器的动作让系统稳定,也就是系统维持在设定值,而且不会在设定值附近晃动。
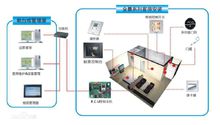 智能控制系统图解
智能控制系统图解
连续系统一般会用微分方程来表示。若微分方程是线性常系数,可以将微分方程取拉普拉斯转换,将其输入和输出之间的关系用传递函数表示。若微分方程为非线性,已找到其解,可以将非线性方程在此解附近进行线性化[1]。若所得的线性化微分方程是常系数的,也可以用拉普拉斯转换得到传递函数。
传递函数也称为系统函数或网络函数,是一个数学表示法,用时间或是空间的频率来表示一个线性常系数系统中,输入和输出之间的关系。
控制理论中常用方块图来说明控制理论的内容。
 我们在哪儿
我们在哪儿 服务热线:0532-80862336
服务热线:0532-80862336 邮箱客服:zhongtonglianda@ztldcn.com
邮箱客服:zhongtonglianda@ztldcn.com